The Land Care Robot
Operators required
Cost Savings
ALL-WEATHER OPERATION
Press
What Others Are saying about us
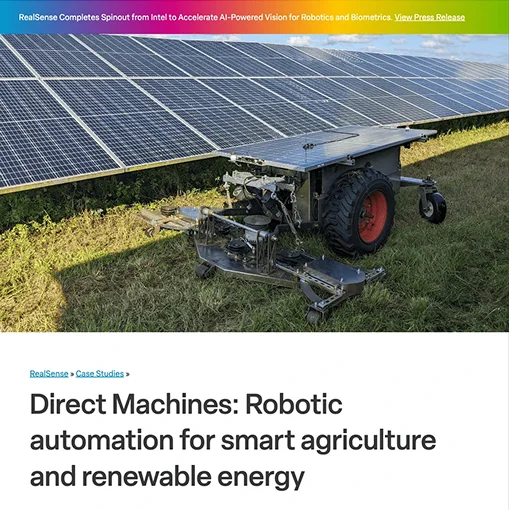
“Directed Machines is a technology leader in the smart agriculture and renewable energy sector. The Seattle, Washington-based company develops and markets Land Care Robots (LCRs) for a wide range of vertical markets including golf courses, farms, ranches, solar farms, and nurseries. The LCR is a heavy-duty, solar-electric machine that can perform many types of land care tasks, either under operator control or in autonomous mode.”
“The Seattle, Washington-based company develops and markets LCRs for a wide range of vertical markets including golf courses, farms, ranches, solar farms, and nurseries.”

“Having worked on sites on where chemicals were previously used, we have observed dramatic positive changes to local ecologies. Biodiversity has increased with new and additional species being introduced. Some creatures have even demonstrated new and adaptive behaviors to engage with LCRs, including nesting and feeding activity.”
“Having worked on sites on where chemicals were previously used, we have observed dramatic positive changes to local ecologies.”
services
One Machine,
Many Capabilities
Using different implements and sensors, a single LCR can Mow, Tow, Know™ and more
Verticals
Who we serve
Where LCRs are solving hard problems and providing real value to customers
Field Mowing
Field Mowing
Mow fields
Perimeter security
Golf & Turf
Golf & Turf
Precision-mow
TECHNOLOGY
Inside the Innovation
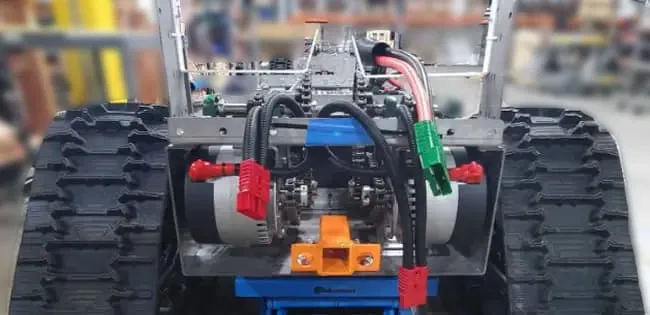
Product Features
Engineered for unrivaled power, durability, and agility
UNFAIR ADVANTAGE
Challenging industry norms at every step, contrarian thinking helped create disruptive technology
Pricing
BEST IN CLASS,
BEST IN VALUE

FEATURE RICH, BUDGET FRIENDLY
Even with their advanced features, LCRs typically cost up to 50% less than other solutions in their class.
Step 1:
We discuss your site (acreage, climate, terrain etc.) and Services you need.
Step 2:
We determine the number of LCRs needed and how to best configure them, and then present you with a full price proposal
Sustainability
WORKING WITH NATURE
Small Footprint, Large Impact
A perched hawk keeps watch as an LCR quietly works below
100% Electric
Biodiversity
Low Noise
HERBICIDE-FREE
LCRs handle tasks mechanically, eliminating the need for harmful chemicals that endanger workers and the environment.
About
Dive into details
Discover what drives us, where we've grown and how to be part of what's next.